- 制御システムの構成
- 装置全体の運転状況を監視する
- 運転制御計算機システム
- 実験運転を円滑に行う
- 放電を手順通りに実施する
- 放電を制御する
- 放電制御計算機システム
- 電磁気データ収集計算機システム
- 高精度長時間デジタル積分器
- プラズマを制御する
- 平衡制御計算機システム
- 加熱・粒子供給制御計算機システム
- プラズマ断面位置形状実時間可視化システム
- プラントを保護する
- 保護操作
- 実験データを保存する
プラズマを制御する
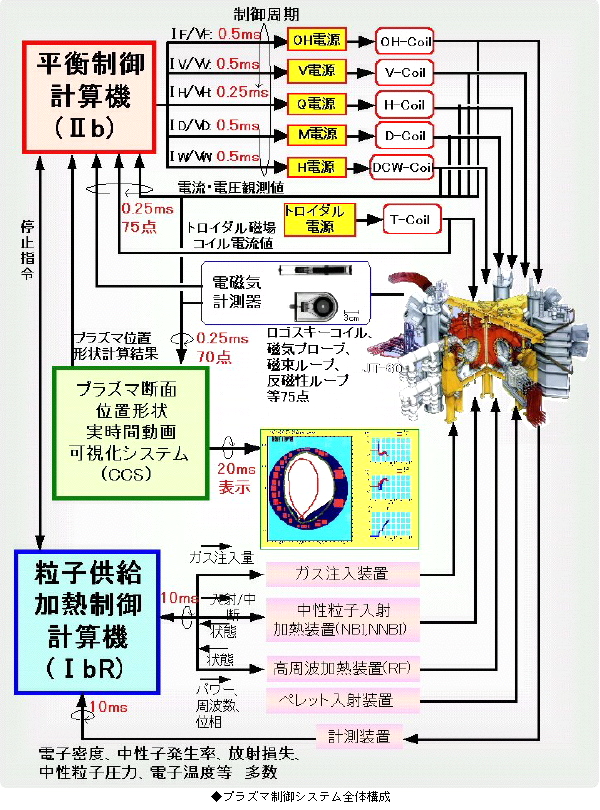
プラズマ制御における平衡制御系とは、プラズマ中の力の平衡状態が成立していると見なせるプラズマを対象とした高速制御系である。プラズマ着火時などプラズマ内部状態が急激に変化する時を除くと、放電中のほとんどの時間でこの平衡状態が成り立っていると考えられる。
具体的な制御量は、プラズマ電流・プラズマ位置・形状である。電磁場を計測する電磁気計測検出器の信号から制御すべき位置形状の代表値を計算する。ポロイダル磁場コイル電流値を操作することにより、目標とする波形に沿うようにフィードバック制御を行う。JT-60の縦長なプラズマで発生する垂直方向の不安定振動を抑制する必要から、制御性能の劣化につながるデジタル制御系の時間遅れを最小限にするために、基本制御周期を250μsecと言う短い値に設定している。
また、プラズマがディスラプションを起こし始めた場合には、直ちにプラズマの持つ電磁エネルギーを回収して装置を安全停止させたり、コイルの応力限界を超えないようにコイルの電流値を自動的に制限する、といった安全保護も行う。
もう1つの粒子供給・加熱制御系は、平衡制御系に比べ通常更にゆっくりと現象が推移する、プラズマ粒子密度や温度に係わる装置を制御対象とする制御系である。制御周期は10msecと設定されている。放電条件で与えた波形に従い、実時間で装置に指令を与えるが、電子密度・中性子発生率などは予め設定した目標波形に沿うようにフィードバック制御を実施することも可能である。
プラズマ断面位置形状実時間可視化システムは、電磁気計測検出器の信号からプラズマ断面位置形状を、コーシー条件面法を用いて実時間で同定・描画するシステムである。本システムでは、同定計算に用いる特殊関数や逆行列計算といった時間のかかる処理を事前に行い、大容量メモリ上に展開しておくという工夫で大幅な時間短縮に成功し、実時間制御の適用を実現している。本システムの稼働により、プラズマ断面の動き、振動、形状変化が計測可能となり、JT-60の高精度・高性能な実験に対応している。
平衡制御計算機システム
本システムは、VMEモジュールを用いて、デジタル制御系を構成している。最高20MHzで高速動作可能なこのVMEバスに計算機をはじめ各種入力機器を直結して動作させている。開発当初は、電磁気計測検出器からの信号を3台のCPUで入力し、並列計算させることにより250μsec(または500μsec)周期で各ポロイダル磁場コイル電源用計算機に指令値を出力してきたが、現システムでは、CPUの処理速度の高速化により、1台のCPU(CPU1)でも250μsec以内での出力が可能となった。
◆プラズマ位置形状フィードバック制御の処理の流れ
加熱・粒子供給制御計算機システム
本システムでは、制御対象項目のアクチュエータとなる各設備が複数あり、かつそれぞれがVMEシステムで構成されていることから、リフレクティブメモリモジュール(RM)を採用して、設備間を1本のループで結び、プラズマ制御に係わるデータを共有することにした。また、リフレクティブメモリは光ファイバーでネットワークを構築するため、高速且つ信頼性の高いデータ通信が可能である。
◆加熱・粒子供給フィードバック制御の処理の流れ
プラズマ断面位置形状実時間可視化システム
これまでのJT-60を用いた実験結果から、以下の2点がわかってきた。
(1)プラズマの形状(楕円度・三角形度)は、エネルギー閉じ込め性能の決定因子の1つであること。
(2)プラズマ表面と真空容器第一壁やRFアンテナとの距離、ダイバータ版上のプラズマ最外殻の磁力線位置は、粒子の出入り、加熱・電流駆動効率、不純物混入と密接に関係している。また、真空容器内機器に損傷を与えることなく実験を行うには、プラズマ表面の位置制御は重要。
一方、プラズマ中心位置といった代表点の情報だけでは、形状変化や振動は把握できず、またビデオカメラ映像では明確なプラズマ断面像は捉えられない。そこで位置形状を正確に再構築することが要求される。
本システムでは、電磁気センサーからの信号やポロイダル磁場コイル電流値等から、コーシー条件面法を用いてプラズマの位置形状を同定し、VMEバスシステムで構成した最新の高速演算処理計算機と描画用計算機で、同定した計算結果を入力し演算、そして描画出力と、一連の処理を高速で実施している。現在は毎秒50コマ(20msec/画面)の速度で、プラズマ断面形状を動画可視化し、同時に主要パラメータを波形表示している(下図参照)。
これにより着火直後のリミタ配位にはじまり、X点位置を形成しているダイバータ配位に加え、プラズマが不安定になり振動する様子などの映像情報を実時間で提供する。